Recognition of Hand Movement for Paralytic persons Based on a neural network.
CODE FOR MAKING A RECOGNITION OF HAND MOVEMENT FOR PARALYTIC PERSONS BASED ON A NEURAL NETWORK IS AS:-



__author__ = 'manoj' import cv import math import cv2 import numpy as np import csv import ctypes MOUSE_LEFTDOWN = 0x0002 # left button down MOUSE_LEFTUP = 0x0004 # left button up MOUSE_RIGHTDOWN = 0x0008 # right button down MOUSE_RIGHTUP = 0x0010 # right button up MOUSE_MIDDLEDOWN = 0x0020 # middle button down MOUSE_MIDDLEUP = 0x0040 # middle button up slidemove=0 textbelow=['one','Show V','three','Rock on!','punch you!','palm open','Cick Mouse'] input_layer_size=900 # M * N of input image hidden_layer_size=25 num_labels=7 #no of class to recognize Theta1 = np.zeros([hidden_layer_size,input_layer_size+1]) Theta2 = np.zeros([num_labels,hidden_layer_size+1]) def make_formatted_csv(): first="Theta1.csv" second="Theta2.csv" global Theta1,Theta2 i=0 for line in csv.reader(open(first)): for x in range(input_layer_size+1): Theta1[i,x]=float(line[x]) i+=1 #----------------------- i=0 for line in csv.reader(open(second)): for x in range(hidden_layer_size+1): Theta2[i,x]=float(line[x]) i+=1 def sigmoid(z): g = 1/(1+np.exp(-z)) return g def predict(X): global Theta1,Theta2 m = X.shape[0] #print X #print X.shape #num_labels = Theta2.shape[0] #p = np.zeros([X.shape[0],1]) #Theta1 = np.matrix(np.random.rand(hidden_layer_size,input_layer_size+1)) #Theta2 = np.matrix(np.random.rand(num_labels,hidden_layer_size+1)) #a=np.ones([56,2]) #np.hstack((np.ones([a.shape[0],1]),a)) h1=sigmoid(np.matrix(np.hstack((np.ones([m,1]),X))) * Theta1.transpose()) h2=sigmoid(np.matrix(np.hstack((np.ones([m,1]),h1))) * Theta2.transpose()) pred= h2.argmax(1) return (pred+1) make_formatted_csv() def contour_iterator(contour): while contour: yield contour contour = contour.h_next() myfont = cv.InitFont(cv.CV_FONT_HERSHEY_SIMPLEX, 1.0, 1.0, 0, 3, cv.CV_AA) (fstx, fsty)=(0,0) INIT_TIME = 10 B_PARAM = 1.0 / 30.0 zeta = 10.0 capture = cv.CaptureFromCAM(1) _red = (0, 0, 255, 0) _green = (0, 255, 0, 0) image = cv.CreateImage((640, 480), 8, 3) img1 = cv.CreateImage((640, 480), 8, 3) av = cv.CreateImage(cv.GetSize(image), cv.IPL_DEPTH_32F, 3) sgm = cv.CreateImage(cv.GetSize(image), 32, 3) lower = cv.CreateImage(cv.GetSize(image), 32, 3) upper = cv.CreateImage(cv.GetSize(image), 32, 3) tmp = cv.CreateImage(cv.GetSize(image), 32, 3) dst = cv.CreateImage(cv.GetSize(image), 8, 3) msk = cv.CreateImage(cv.GetSize(image), 8, 1) skin = cv.CreateImage(cv.GetSize(image), 8, 1) skin = cv.CreateImage(cv.GetSize(image), 8, 1) handlarge = cv.CreateImage(cv.GetSize(image), 8, 1) handorig = cv.CreateImage(cv.GetSize(image), 8, 3) copyskin = cv.CreateImage(cv.GetSize(image), 8, 1) firstcopyskin = cv.CreateImage(cv.GetSize(image), 8, 1) circleimg = cv.CreateImage((640, 480), 8, 1) destblobimg = cv.CreateImage((640, 480), 8, 1) drawimage = cv.CreateImage(cv.GetSize(image), cv.IPL_DEPTH_8U, 3) savehandimage = cv.CreateImage((30, 30), cv.IPL_DEPTH_8U, 1) cv.SetZero(av) for i in range(0, INIT_TIME): image = cv.QueryFrame(capture) cv.Flip(image, image, 1) cv.Acc(image, av) cv.ConvertScale(av, av, 1.0 / INIT_TIME) cv.SetZero(sgm) for i in range(0, INIT_TIME): image = cv.QueryFrame(capture) cv.Flip(image, image, 1) cv.Convert(image, tmp) cv.Sub(tmp, av, tmp) cv.Pow(tmp, tmp, 2.0) cv.ConvertScale(tmp, tmp, 2.0) cv.Pow(tmp, tmp, 0.5) cv.Acc(tmp, sgm) cv.ConvertScale(sgm, sgm, 1.0 / INIT_TIME) prevfst=(0,0) while True: image = cv.QueryFrame(capture) cv.Flip(image, image, 1) cv.Convert(image, tmp) cv.Sub(av, sgm, lower) cv.SubS(lower, cv.ScalarAll(zeta), lower) cv.Add(av, sgm, upper) cv.AddS(upper, cv.ScalarAll(zeta), upper) cv.InRange(tmp, lower, upper, msk) cv.Sub(tmp, av, tmp) cv.Pow(tmp, tmp, 2.0) cv.ConvertScale(tmp, tmp, 2.0) cv.Pow(tmp, tmp, 0.5) cv.RunningAvg(image, av, B_PARAM, msk) cv.RunningAvg(tmp, sgm, B_PARAM, msk) cv.Not(msk, msk) cv.RunningAvg(tmp, sgm, 0.01, msk) cv.Copy(msk, skin) cv.Erode(skin, skin, None, 1) cv.Erode(skin, skin, None, 1) cv.Dilate(skin, skin, None, 1) cv.Dilate(skin, skin, None, 1) storage = cv.CreateMemStorage(0) firstcopyskin = cv.CloneImage(skin) contour = cv.FindContours(firstcopyskin, storage, cv.CV_RETR_CCOMP, cv.CV_CHAIN_APPROX_SIMPLE, (0, 0)) blobarea = 0 (rectx, rexty, rectw, recth) = (0, 0, 0, 0) for c in contour_iterator(contour): PointArray2D32f = cv.CreateMat(1, len(c), cv.CV_32FC2) for (i, (x, y)) in enumerate(c): PointArray2D32f[0, i] = (x, y) # Draw the current contour in gray #gray = cv.CV_RGB(100, 100, 100) #cv.DrawContours(image, c, _red ,_green,10) #cv.DrawContours(image,c,cv.ScalarAll(255),cv.ScalarAll(255),100,2,8) if cv.ContourArea(c) > blobarea: blobarea = cv.ContourArea(c) rectx, rexty, rectw, recth = cv.BoundingRect(c) #print rect#x,y,w,h if rectw > 0 or recth > 0: if recth > 190: recth = 190 #cv.SetImageROI(image,(rectx,rexty,rectw,recth)) #cv.ShowImage("Source", image) #cv.ResetImageROI(image) #else: # cv.ShowImage("Source", image) hand = (rectx, rexty, rectw, recth) cv.Zero(handlarge) cv.Zero(handorig) cv.SetImageROI(skin, hand) cv.SetImageROI(handlarge, hand) cv.Copy(skin, handlarge) cv.ResetImageROI(skin) cv.ResetImageROI(handlarge) cv.Dilate(handlarge, handlarge, None, 1) cv.Erode(handlarge, handlarge, None, 1) cv.Copy(image, handorig, handlarge) #cvDrawRect(image,cvPoint(hand.x,hand.y),cvPoint(hand.x + hand.width , hand.y+hand.height),CV_RGB(255,0,0)) copyskin = cv.CloneImage(handlarge) moments = cv.Moments(handlarge) try: mom10 = cv.GetSpatialMoment(moments, 1, 0) mom01 = cv.GetSpatialMoment(moments, 0, 1) area = cv.GetCentralMoment(moments, 0, 0) posX = int(mom10 / area) posY = int(mom01 / area) #cv.Circle(image,(posX,posY),3,cv.CV_RGB(0,255,0), 3, 8, 0 ) except: pass contour = cv.FindContours(copyskin, storage, cv.CV_RETR_CCOMP, cv.CV_CHAIN_APPROX_SIMPLE, (0, 0)) blobarea = 0 larrect = (0, 0, 0, 0) larseq = 0 for c in contour_iterator(contour): PointArray2D32f = cv.CreateMat(1, len(c), cv.CV_32FC2) for (i, (x, y)) in enumerate(c): PointArray2D32f[0, i] = (x, y) if cv.ContourArea(c) > blobarea: blobarea = cv.ContourArea(c) larrect = cv.BoundingRect(c) larseq = c if larrect[2] > 0 or larrect[3] > 0: cv.Rectangle(image, (larrect[0], larrect[1]), (larrect[0] + larrect[2], larrect[1] + larrect[3]), cv.CV_RGB(255, 0, 0), 2) cv.DrawContours(image, larseq, cv.ScalarAll(255), cv.ScalarAll(255), 100, 2, 8) cv.DrawContours(handorig, larseq, cv.CV_RGB(255, 0, 0), cv.ScalarAll(255), 255) hull_storage = cv.CreateMemStorage(0) storage3 = cv.CreateMemStorage(0) hulls = cv.ConvexHull2(larseq, hull_storage, cv.CV_CLOCKWISE, 0) defectarray = cv.ConvexityDefects(larseq, hulls, storage3) farthestdistance = 0 for defect in defectarray: start = defect[0] end = defect[1] depth = defect[2] ab = start dist = math.sqrt((float)(posX - ab[0]) * (posX - ab[0]) + (posY - ab[1]) * (posY - ab[1])) if (dist > farthestdistance and posY > ab[1]): farthestdistance = dist fstx = ab[0] fsty = ab[1] cv.Line(image, start, depth, cv.CV_RGB(255, 255, 0), 1, cv.CV_AA, 0) cv.Circle(image, depth, 5, cv.CV_RGB(0, 255, 0), 2, 8, 0)#green cv.Circle(image, start, 5, cv.CV_RGB(0, 0, 255), 2, 8, 0)#blue cv.Line(image, depth, end, cv.CV_RGB(255, 255, 0), 1, cv.CV_AA, 0) fst = (fstx, fsty) #for hand drawing cv.Line(drawimage,fst,prevfst ,cv.CV_RGB(0,0,255),5) cv.Circle(drawimage, fst, 5, cv.CV_RGB(0,0,255), -2, 8,10) prevfst=fst cv.ShowImage("drawing image",drawimage) cv.Circle(image, ( posX, posY ), 5, cv.CV_RGB(0, 255, 0), 5) cv.Circle(handorig, ( posX, posY ), 5, cv.CV_RGB(0, 255, 0), 5) rad = math.sqrt((float)(posX - fst[0]) * (posX - fst[0]) + (posY - fst[1]) * (posY - fst[1])) cv.Line(image, fst, ( posX, posY ), cv.CV_RGB(255, 255, 0), 4) cv.Circle(image, ( posX, posY ), int(rad / 1.5), cv.CV_RGB(255, 255, 255), 6) cv.Line(handorig, fst, ( posX, posY ), cv.CV_RGB(255, 255, 0), 4) cv.Circle(handorig, fst, 5, cv.CV_RGB(0, 0, 255), 5) #nos of fingers cv.Zero(circleimg) cv.Zero(destblobimg) cv.Circle(circleimg, (posX, posY ), int(rad / 1.5), cv.CV_RGB(255, 255, 255), 6) cv.And(handlarge, circleimg, destblobimg) #cv.ShowImage("circleimg",circleimg) #cv.ShowImage("blobimg",destblobimg) contour = cv.FindContours(destblobimg, storage, cv.CV_RETR_CCOMP, cv.CV_CHAIN_APPROX_SIMPLE, (0, 0)) fingnocnt = 0 for c in contour_iterator(contour): fingnocnt += 1 if fingnocnt >= 1: lab = str(fingnocnt - 1) else: lab = str(0) cv.PutText(image, lab, (10, 50), myfont, cv.CV_RGB(255, 0, 0)) ## #save the hand ## if (fingnocnt == 2): ## imageno=imageno+1 ## ## #imagename=str(fingnocnt-1)+"/ges"+str(imageno)+".bmp" ## #imagename="5/ges" +str(imageno)+".bmp" ## ## imagename="ges" +str(imageno)+"d.bmp" ## cv.SetImageROI(handlarge,larrect) ## cv.Resize(handlarge,savehandimage) ## cv.Dilate(savehandimage,savehandimage,0,1) ## cv.Erode(savehandimage,savehandimage,0,1) ## cv.SaveImage(imagename,savehandimage) ## cv.ResetImageROI(handlarge) cv.SetImageROI(handlarge,larrect) cv.Resize(handlarge,savehandimage) #cv.Dilate(savehandimage,savehandimage,None,1) #cv.Erode(savehandimage,savehandimage,None,1) cv.SaveImage("my.bmp",savehandimage) cv.ResetImageROI(handlarge) cvimage = cv2.imread("my.bmp",cv2.CV_LOAD_IMAGE_GRAYSCALE) b=np.matrix(cvimage,np.float64,True) a=np.reshape(b,[1,b.shape[0]*b.shape[1]],order='F') astd=np.std(a,1) + 0.0000001 d=(a-np.mean(a,1))/astd pred=predict(d) #predtext="Using Neural Network: "+str(pred) predtext="Using Neural Network: "+textbelow[pred-1] cv.PutText(image,predtext,(10, 440), myfont, cv.CV_RGB(255, 0, 0)) if pred==4: cv.SetZero(drawimage) if pred==5: cv.SaveImage("dynamic.bmp",drawimage) cv.PutText(image,"image saved",(300, 50), myfont, cv.CV_RGB(255, 0, 0)) slidemove+=1 if slidemove % 30 ==0: #ctypes.windll.user32.SetCursorPos(500,500) #ctypes.windll.user32.mouse_event(MOUSE_LEFTDOWN ,0,0,0,0) #ctypes.windll.user32.mouse_event(MOUSE_LEFTUP,0,0,0,0) slidemove=0 cv.ShowImage("largehand only-binary color", handlarge) cv.ShowImage("largehand only-original color", handorig) cv.ShowImage("original image", image) cv.ShowImage("all foreground", skin) key = cv.WaitKey(1) if key == 27: break cv.DestroyAllWindows() del capture
ITS THEORY IS AS FOLLOWS:-
1. Introduction
A sign language is a language which, uses manual
communication and body language to convey
meaning. This can include combining hand shapes,
orientation and movement of the hands, arms or
body, and facial expressions to fluidly express a
speaker's thoughts . So ,its important language for
Persons with disabilities . Patients monitoring
techniqueuses image processing and computer
vision to produce understanding sign .It keep track
of various hands parameters and provides data to
analysis it and monitor system. It is depend on
gestures language Interpreter of the patients (i.e
interaction descriptor ).This utility system have
general facility due to its depend on monitoring the
patients in different regions. If a patient ask to eat
or something else , the system helps him to achieve
what he wants, even if this request out of reach .It is
used to express of patient wishes [1] . This method
is the easiest way to help the patients and what they
need , when the patient unable to walk due to
stroke, and what feeling in complete paralysis,
except his hands. Then the system completely
depend on hands movements.The details of system
consist of digital camera connects with active
system to monitor closely the SP.The idea of the
system is to monitor the patient's hands. Basically,
the movement of the patient will be interpreted and
compared with the database , depend on special
movement build in the system. The system reject
any gestures not exist (contrary to the rules). The
error message are displayed when the patient's
gesture is out of system rules[2][3].
2. Literature Review
Basically, the unwell person is weak that can’t
press any button and most of them can’t walk and
many researchers with researches to helpthese
persons to do his daily jobs. Many interesting
applications of hand gesture recognition have been
introduced in many latest years. Below , review
some of them:
Mitra and Acharya have done excellent work with
hand gesture recognition where user made gesture
and receiver recognized them[15]. Ahn, Kim,
Kwak, J. Kim and D. H. Kim have perfect research
in this area that developed augmented interface
table using infrared cameras for pervasive
environment[16]. Chaudhary and Raheja has
described designing for intelligent systems in his
work[17]. Kuno, Sakamoto, Sakata, and Shirai
write in this subject to find a solution to the
problem by use of restricted backgrounds and
clothing like dark gloves or wearing a strip on wrist
[18]. Wu and Huang has been extracted hand region
from the scene using segmentation techniques[19].
Vezhnevets, Sazonov, and Andreeva describes
many useful methods for skin modeling and
detection[20].
3. System Methodology
System detection and recognition ofHG is a
classification system which distinguishesHG of
allowed gestures of SP.This methodology uses
processing of digital image technique for the
classification purpose.The input system is specific
HG Images saved in private database which are in
digital format. This database can be add new
images of HG by agreement of doctor according
patients need . This system depends on the denoise
(noise reduction or removal) images, where the
images are processed in advance , even before
adding them to the assigned database . The
proposed system depend on GUI or called vision
interface [4][5][14].
Vision interfaces are based on feasibility and
popularity because the computer machine is able to
communicate with user using camera or webcam. In
this way, the user can be able to give commands
(hands commands or gestures) to the computer by
just showing some actions (hand movements) in
front of the webcam without typing keyboard and
clicking mouse button. Then , the interaction is
occur between user and computer [6].
User interface for the hand gesture recognition was
developed using MATLAB GUI (Graphical User
Interface). During run the application handles video
streaming from the webcam and timing of frame
processing. Frame rate can exceed 20 fps which is
more plenty for reliable human gesture detection.
Hand movements are the key points in hand gesture
recognition modeling in the human hand model.
This approach is based detection and recognition on
applying a learning model to reconstruct the hand
model[6][10].
4. Artificial Neural Network
ANN is a computational model which similar to
the way human brain works. Human brain is
consist of billions of neurons interconnected by
synapses, the neural networks can be form as a
network of computational nodes connected with
each other through links. This networks needs to be
trained continuously with set of data before it can
be used to produce the desired output. Because of
neural network are adaptive nature , the structure of
these networks can changed easily depend specific
information that that enter to the network during the
learning phase. The links these networks are
assigned during training phase . ANN are used to
model complex relation between input signals and
output signals .Neural networks can find various
patterns in input signals [7] . neural networks can
be very helpful in modeling complex systems due
to its flexible construct ,that is to be very difficult in
traditional modeling. ANN are very useful in
image processing fields ,speech recognition ,
pattern recognition and various that requirement
information extraction. neural network can be
classify into two main categories : the input and
the output. ANN is consist of many nodes or
neurons called processing elements (PE) and
interconnect between them, set of nodes represent
the input nodes of neural network that take data
from external environment.A set of nodes represent
output nodes that produce intermediary hidden
nodes or not. These hidden nodes connect with
each other by links called connections, connect with
input or output nodes or other hidden nodes.Any
ANN consist of 3 main parts: (1) Input layer nodes
(2) Output layer nodes (3) Hidden layer nodes
(internal nodes) [8],[9] . Figure (1). show the block
diagram of neural network with 12 nodes: 3 nodes
in the input layer, 7 nodes in the hidden layer and 2
nodes in the output layer. The neural network can
be used in actual production environment . The
process of training of artificial neural networks is
called learning of neural network, which is
generally done by one of three ways: (a)Supervised
Learning (b)Unsupervised Learning

5. Image Database
The HG images, which are used for training and
testing the neural network within the system HG
Recognition (HGR) , represent a various gestures
that help a SP daily.There are a different kinds of
data image , including medical images, and natural
images and other. These images intended for
training purposes and to extract the required results.
Other group ofHG images are used to training in
supervised neural networks to obtain results, where
they are taking these pictures through the internet or high resolution digital cameras or webcam in
different sizes and angles[11].
There are two main operation are made on the
training images: (1) Images are converting to
grayscale images , and (2) Uniform of the
background images. The updating of Image
database are continuous , then the supervised
neural network training on different types of
images. This means that database images is a
dynamic, not static [12] . There are various types of
HG, below in the figure (2), the most important HG
using by SP.

6. Procedure of work
A main objective of Hand Gesture Recognition
(HGR) is the ability to use HG for the general
applications, aiming for the natural interaction
between the human and computer.
Supervised Neural Networks (SNN) are used for
gesture recognition and used for not fully explored
gesture . The detection of human gestures in the
human hand structure is an important issue in most
hand model studies and in some gesture recognition
systems[13]. HG have many possibilities in the
field of Computer Vision and Human machine
interaction. Gesture recognition could be based on
probability, if the background is not fixed or image
has other same kind of objects that would also lead
to Inaccurate results. There are three main stages in
Hand Gesture Recognition Process (HGRP):(1)
Image Capture Phase (ICP).(2) Gesture Extraction
(Feature Extraction) and(3) Gesture Recognition
(GR).These stages are contain the below :(1)
Designing of Algorithm.(2) Speed of processing.
(3) Architecture of system and(4) Interface
Video.The activities of SP can detect and
recognized by the camera or Webcam in the
specific area . The results of these cameras can be
analyzed and used to control the operation of
devices in these application environments. we can
analyze all the result of camera , histogram it and
controlled on the operate of devices in the different
areas e.gCar, a Plane, Room or Hospital and so on.
Away of the scientific complexities, we focused on
2D static Hand Gesture Recognition (HGR) only.
The system started when the image captured from
Camera or Webcam. The system dealing with high
resolution images, because low resolution images
lose many useful information when captured by
camera. Next, the Preprocessing are begin to get the
detection results of image processing . Gesture
Histograms are used to compare test Hand
Gestures (HG) with the actual images database .
System used six HG are important and commonly
used to training the supervised neural network .The
system is very easy and flexibility . The system was
built to train six HG using neural networks. So you
can add other HG to the system help SP in daily
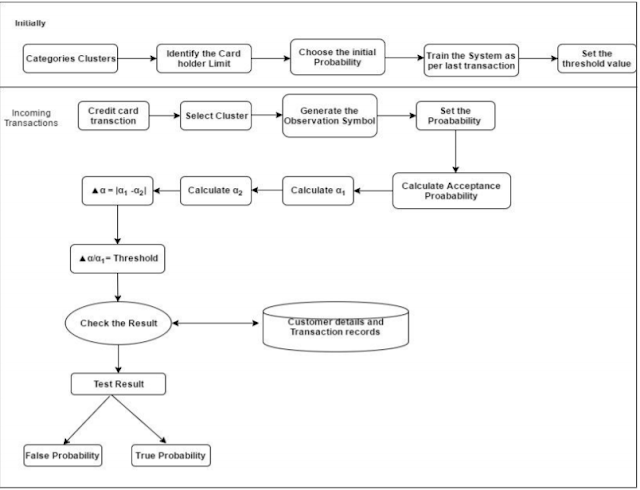
jobs .The proposed algorithm of SPHG System
have the below steps and showing in details in the
figure (3):
Step1. Image capture from high resolution camera
or webcam.
Step2. Images resizing 150 ×140 pixels fit (the
desired size).
Step3. Edges detection (detect boundaries of HG
).In this step we are using 2- filters. For the n
direction n=[0 -1 1]. For the m direction m= [0 1 -
1].
Step4. Divide two image matrices resulting dn and
dm element by element and then taking the atan
(tan−1) to get gradient orientation.
Step5 . Re-arrange the blocks of inputting image
into columns by calling MATLAB function im2col
. This is optional step .
Step6. Converting the column matrix with the
values to degrees. This way we can scan the vector
for values ranging from 0 to 90. This can also be
seen from the orientation histograms where values
come up only on the first and last quarter.
During the training and learning in the proposed
neural network, the Neural Network learning
beginwith putting a HG image as iterations one by
one, each iteration consist of 8×8 matrix elements
(PE) by multi iterations to the suggested net . The first iteration put to the suggested net as an input
block and applying feedforword NN(FFNN). First
iteration input compare with desired
output(supervised) if match or not, if there is an
error(defects) ,then adjust weights of each node
(PE) by applying backpropagation(BpNN) for the
same iteration until arrive to same desire output (i.e
during the training process these weights are
adjusted to achieve optimal accuracy and coverage)
.
.

Figure 3. SPHG System Flowchart
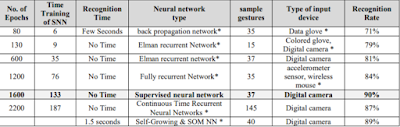
Table 1.below referred tothe processing of time based Epochs with different types of current SNN &the
compression between the previous neural networks processing.Note that , (*) referred to previous researches articles.

7. Conclusion
In this papers, we present a new proposed model for
SP, where this patients cannot move their bodies
except hands. We build this system to read hands
movements and translate this movements to
requests carried out by doctors.The future HGDR is
very bright especially for disabled patients and SP .
This technique is natural and easy way to make a
contact with a machine (simulation) , where the
user not needing the training phase . This technique
can be made a wireless technique, especially
faraway patients . At this time , this technique can
be controlled remotely. So in any case of disaster
like fires or earthquake , if the person is in danger
and can’t get a help , he can show HG syntax to the
system that will interpret it and send it as a signal to
transceiver nearby and it will forward the signal
further to the rescue team in the control room. This
system can be development by adding Global
Positioning System. This way help the persons to
detect there locations by rescue team.
Comments
Post a Comment